PARTNERS








NEWS & EVENTS
Read our views on the things that matter to you. And get to know our people. We make the difference.
The Adaptive Assembly System (AAS) comprises an innovative adaptive workstation equipped with a collaborative robot...
Everyday digital tasks can highly benefit from systems that recommend the right information to use...

TEO (D.5.4) represents the Conversational Agent included within a wider application for smartphones, together with...
As described in our previous post on Innovation management we will give an overview of...
As the CO-ADAPT project is progressing to its end we will present in different posts...
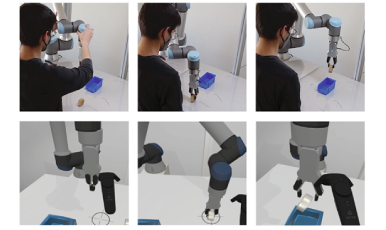
The Human-Inspired Technology Research Centre (University of Padova) team has designed and developed an Adaptive...